构建第一个ARM程序

先说一下环境:
1 | Device: Raspberry Pi Zero W |
先看看代码
1 | .global main |
然后编译运行
1 | as -o first.o first.s |
不出意外的话你讲看到输出什么都没有,这样就没意思了,重新运行下
1 | ./first ; echo $? |
不出意外你将会看到输出1,echo $?的意思是获取最后命令的退出状态,什么是退出状态,你写一个c程序的main方法返回的那个数字就是,0代表没错误,其他就表示有错误
接着来一步一步的看这个程序
首先是第一行的.global main
1 | .global main |
main表示每个程序的入口,你如果不写main,那你没发用gcc链接,而且你会得到类似这样的错误:
1 | /usr/lib/gcc/arm-linux-gnueabihf/6/../../../arm-linux-gnueabihf/crt1.o: In function `_start': |
所以还是乖乖的用main,.global的作用是把main声明为全局的,主要是为了让链接器知道,它是一个GNU汇编器指令,这种指令的作用是让汇编器做一些特殊的事;以.开头,后面跟指令和参数。
接着是main:,这就相当于函数名了
然后是 mov r0, #0x1,将1添加到r0;多说一句,mov不是移动的意思,是复制的意思,比如 mov r0, r1 不是把r1移动到r0,是复制,因为执行完了后r1并没有变。然后 r0 寄存器在arm中是用作返回值的。
最后是 bx lr ,bx lr等价于mov pc,lr,lr是寄存器R14,这个寄存器保存的是函数返回地址;这里的解释是我从网上抄的,反正我看不太明白这函数返回地址的含义;我用一个特别容易理解的办法解释,那就是调试;
我用汇编简单写了一个Hello World的程序:
1 | .global main |
特别简单,编译链接运行
1 | pi@raspberrypi:~/Documents/Arm/Program $ as -o hello.o hello.s && gcc -o hello hello.s |
没任何问题,开始调试gdb hello,下个断点
1 | gef➤ br main |
然后运行run,可以看到程序停在了main方法
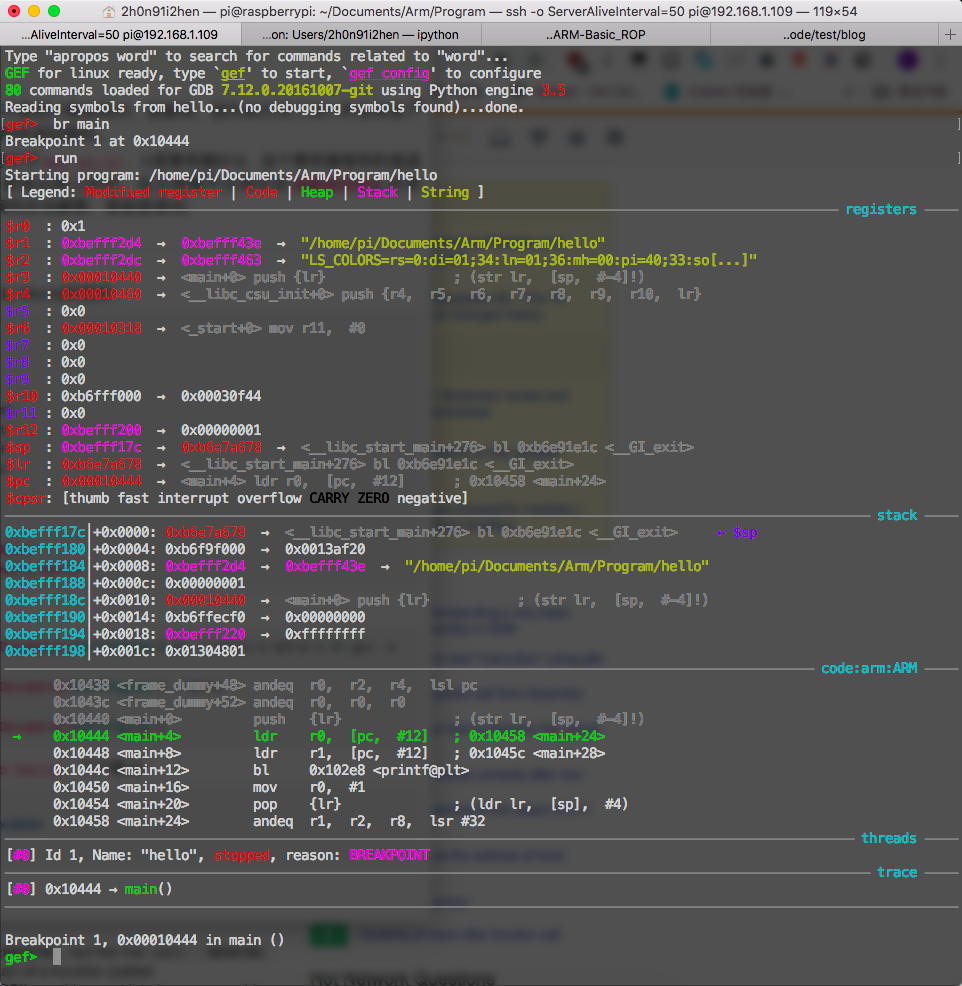
我们只需要关注 lr 寄存器,此时$lr : 0xb6e7a678,ni ni si 后
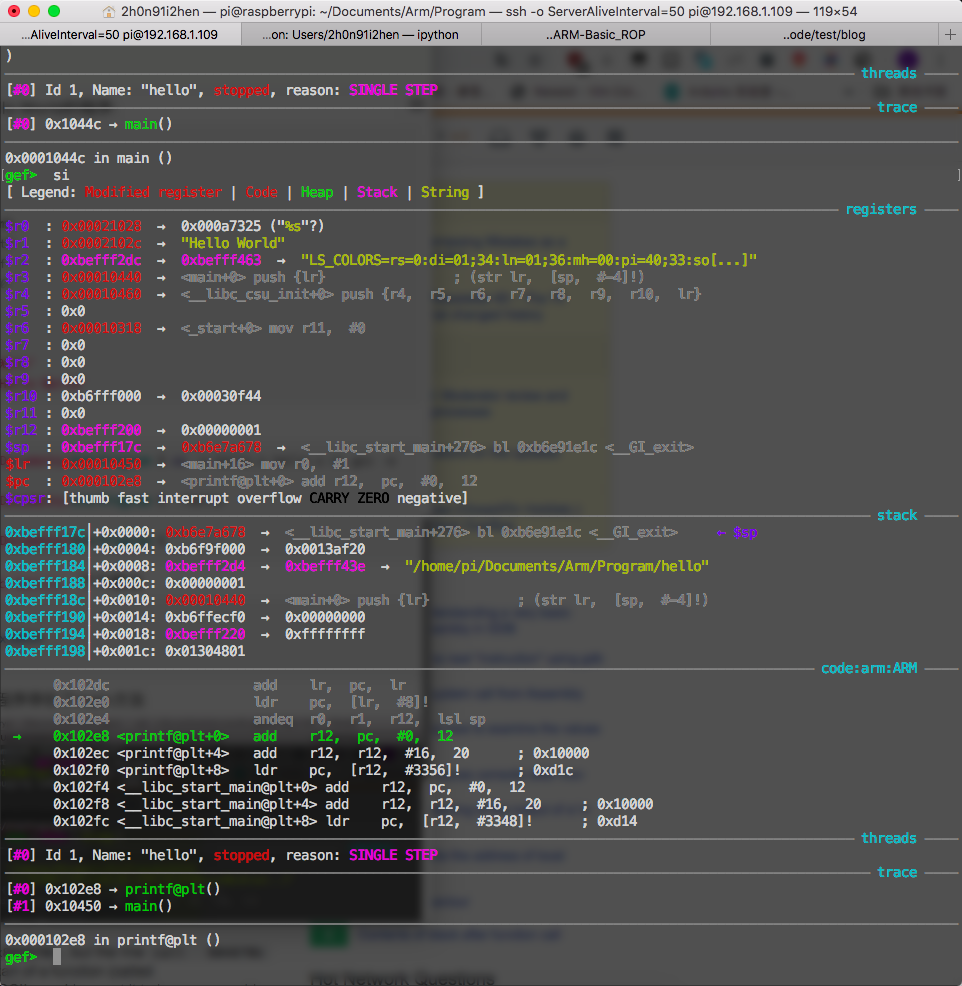
lr寄存器变了,$lr : 0x00010450,反汇编main方法可以看到lr的地址指向printf后面的指令

所以可以得知,lr寄存器的作用是保存上一个调用本方法的下一条指令地址,emmm咋感觉有点绕,反正大家看到这调试应该都懂了;
其实还可以说说push,我们可以回到刚run的时候,那时候push {lr}已经执行了,lr寄存器内容是0xb6e7a678,而sp栈寄存器的内容是0xbefff17c,这个地址的内容正是栈顶,内容就是lr的内容
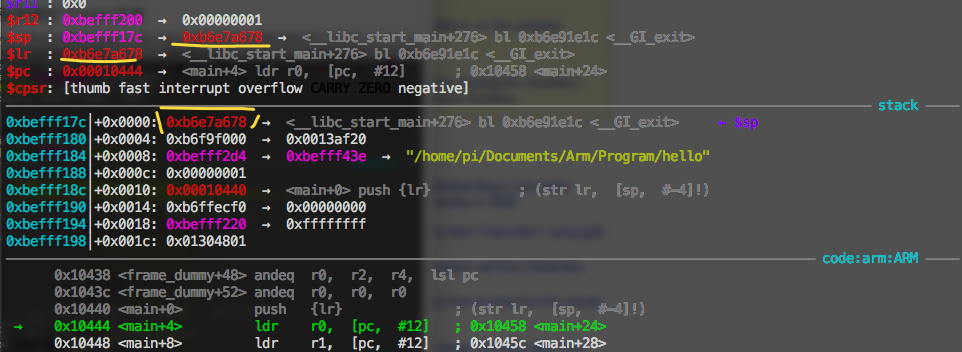
所以 push {lr} 就是把lr压入栈